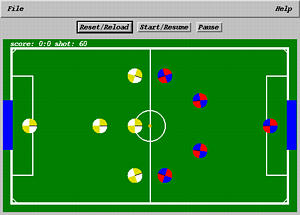
Figura 1 Simulador SoccerBots
O Soccerbots simula
a dinâmica e as dimensões de um jogo de Futebol de Robôs,
segundo o regulamento da RoboCup
para a liga de small robots com cinco jogadores. Ele fornece
um campo virtual bidimensional e simula todos os movimentos da bola e dos
jogadores. Os movimentos dos agentes/jogadores é controlado pelo
programa feito pelo usuário que pode ser introduzido no simulador,
sendo um programa para cada jogador. Neste trabalho, pretende-se avaliar
e desenvolver programas para os agentes/jogadores que rodam no Soccerbots.
Na tabela 2 estão
descritas as regras da RoboCup para a liga de small robots
adaptadas ao simulador Soccerbots. É importante notar que
a proximidade entre o simulador e a liga de small robots possibilitará
o reuso dos resultados da pesquisa na modalidade de robôs reais.
| Time | formado por cinco robôs (cinco programas de agentes). |
| Robôs | possue tamanho proporcional ao campo, forma circular com rotação de até 360 graus e velocidade máxima 0,3 m/s. |
| Bola | equivale a uma bola de golf laranja com velocidade máxima 0,5 m/s quando chutada e de colisões perfeitamente elásticas. |
| Chute | resultado do choque entre o jogador e a bola. |
| Cores | não importa para simulação. |
| Jogo | uma vez que o jogo comece, ele é executado para sempre. Isto logo será mudado para estar de acordo com as regras da RoboCup: dez minutos para cada tempo. |
| Paredes | uma parede é colocada ao redor de todo o campo, exceto nos gols. Robôs podem deslizar junto às paredes. |
| Zona de defesa | só um robô pode defender nesta área do gol.. |
| Uniformes | os robôs estão identificados por um padrão, que tem o aspecto de uma pizza cortada em quatro e colorida por duas cores. No Soccerbots as cores não importam. |
| Comunicação | não há nenhuma facilidade presente, para comunicação entre robôs, mas isto pode ser feito. |
| Goleiros | não tem nenhum meio de pegar a bola, ele simplesmente a rebate. |
| Saída de bola | a posição dos jogadores deve ser conforme a figura acima. |
| Faltas e Cobranças | há um tempo limite para o chute, caso ultrapasse é considerado como bola presa e faz com que o simulador imponha uma cobrança de falta: a bola deve voltar para o meio de campo. |